3D printable autonomous mobile robot platform, based on ROS.
It's open source and you can make it yourself too.

3D printable autonomous mobile robot platform, based on ROS.
It's open source and you can make it yourself too.
First, don't expect a ready-made solution, a lawnmower, or a replacement for a similar commercially produced product. Be aware that this is not a cheap matter and that its construction will take a lot of time. You will need persistence, dexterous hands, and you may even have to learn something new. Think carefully about all of the above before you decide to build. It doesn't make sense to spend money on something you won't finish.
Although I tried to make almost everything on the robot 3D printed, this project is definitely not just about printing. You will definitely need the basics of electrical engineering, and if you want to modify or further develop Vitulus, you will need experience with 3D modeling and programming languages Python, C++, HTML and JavaScript. You will definitely need to know or at least learn the basics of ROS.
It's a toy for anyone who is curious and interested in robotics. For me, it's a way to learn new things and have fun. Its equipment is intended more for development and experimentation than for use for a specific purpose. However, this does not change the fact that only a robot capable of doing something useful has any meaning. Vitulus is not a commercial robotic lawnmower, but I want it to be able to mow the grass flawlessly and in the future not only that. It would be a shame to let the robot only mow the lawn, its potential is certainly higher. I try to construct it in such a way that various devices or sensors can be connected to it, thus expanding its possibilities and skills. An open space for anyone with curiosity.
I gradually publish the parts that I consider complete, but this does not mean that they are without errors and perfect. At this point, you have everything set up for Vitulus work as a mower. If you are interested in the project and you decide to build it, I will be happy if you later join in its further development and help Vitulus to be a better and smarter robot.
He already mows my garden quite well, what about yours?


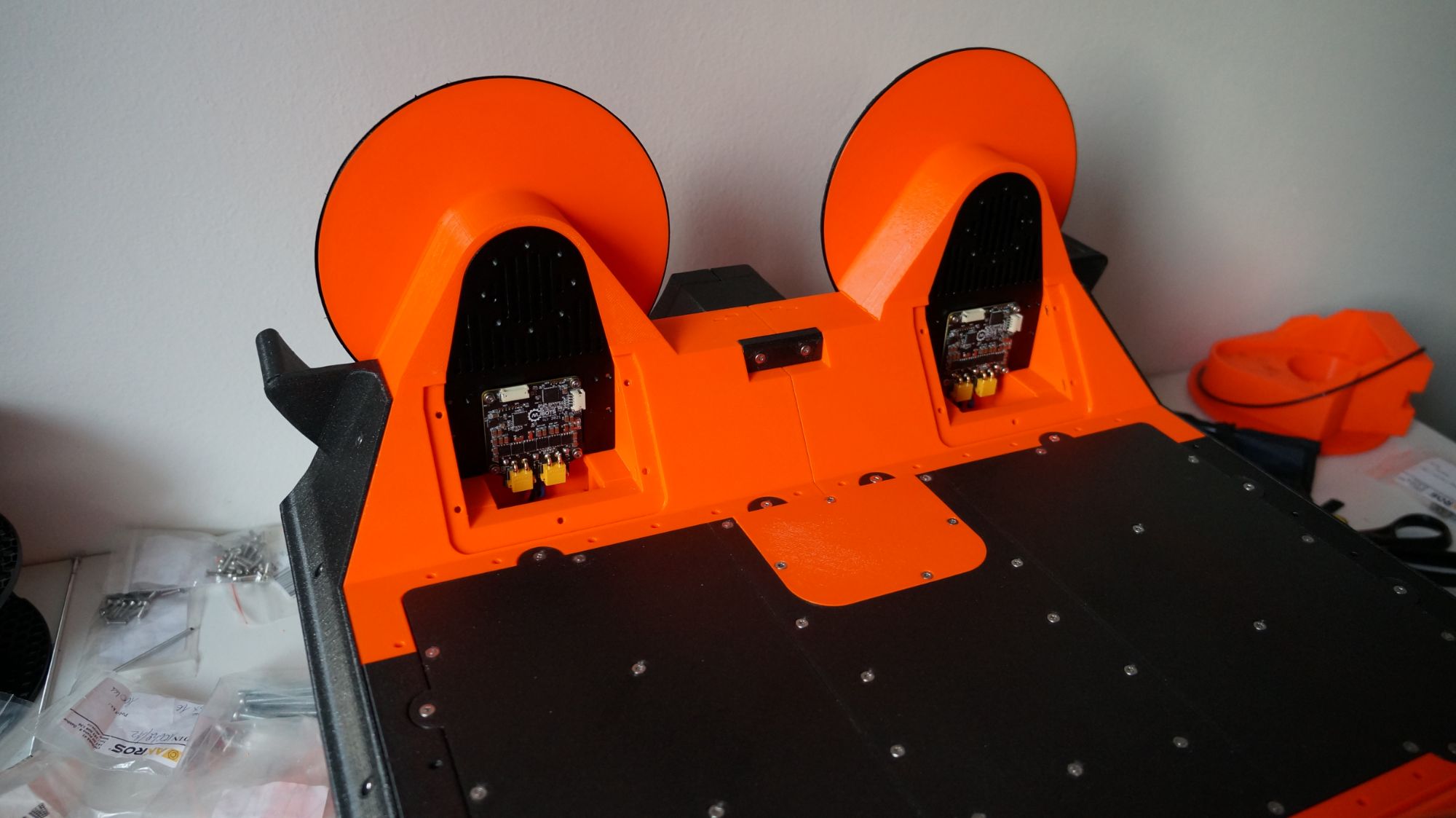
Motor controllers: MJbots Moteus
Motors: BLDC 5208
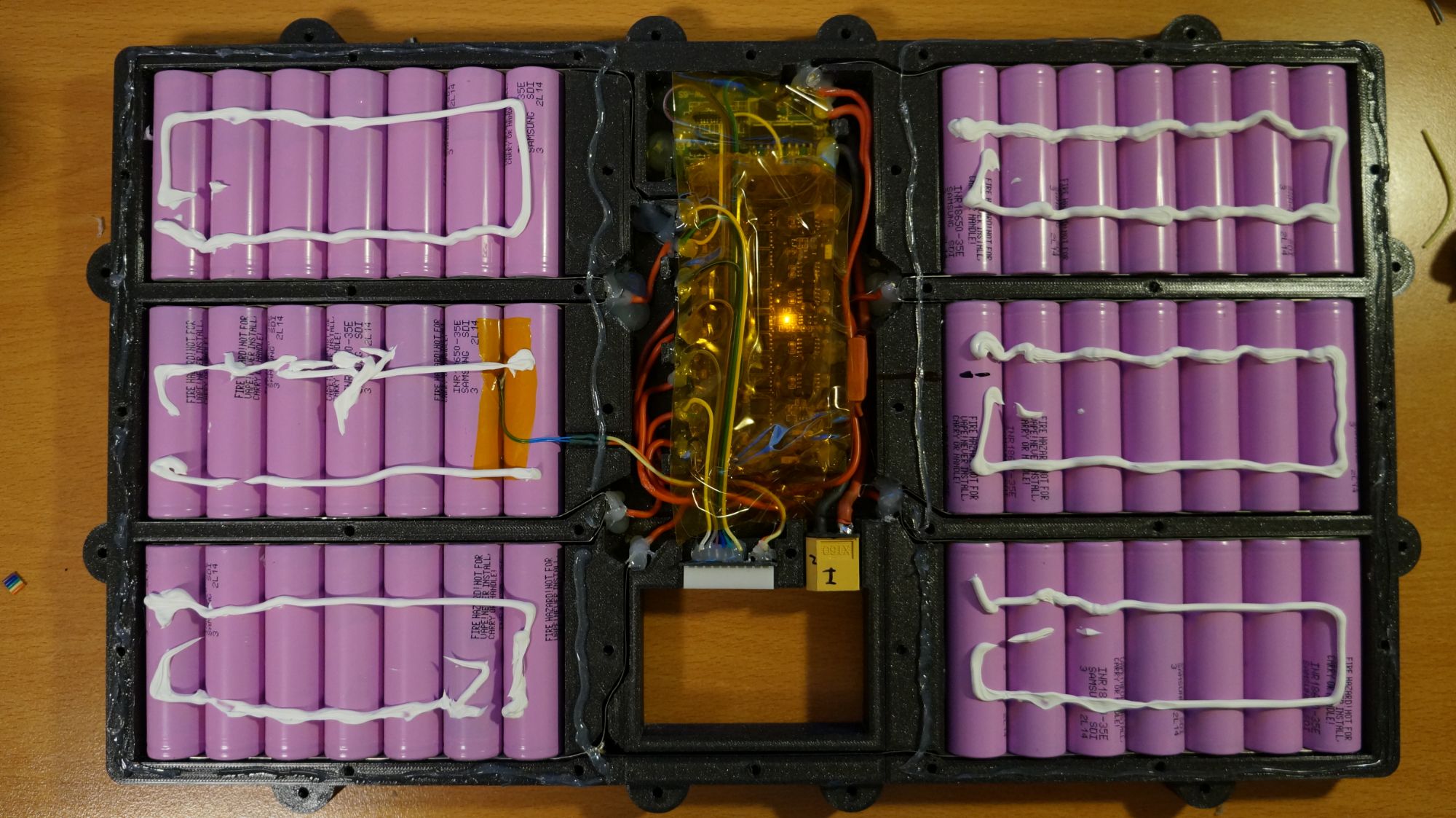
Battery: Li-Ion 18650 6S7P 24 500 mAh, BMS, active balancer
Power controller: Vitulus power module, ROS support
GNSS RTK: Ardusimple RTK2B - ZED-F9P
GNSS navheading: Ardusimple - ZED-F9P (optional)
IMU: BNO085
Turn radius (blue): 267.75 mm
Robot radius (red): 352 mm
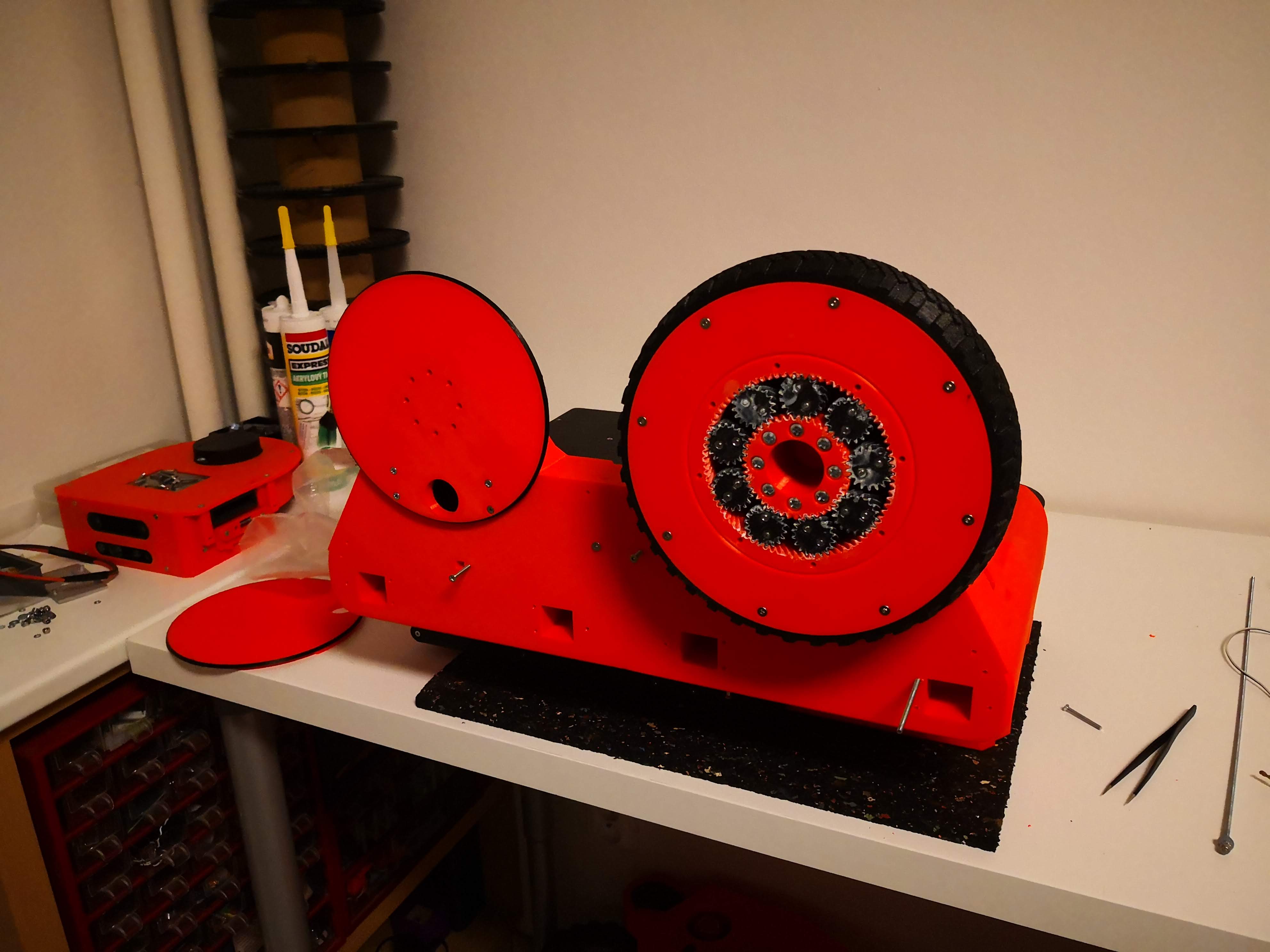
Wheel diameter: 210 mm
Wheel track: 472 mm
Width: 528 mm
Length: 521 mm
Height: 360 mm
Max speed: 1.5 m/s


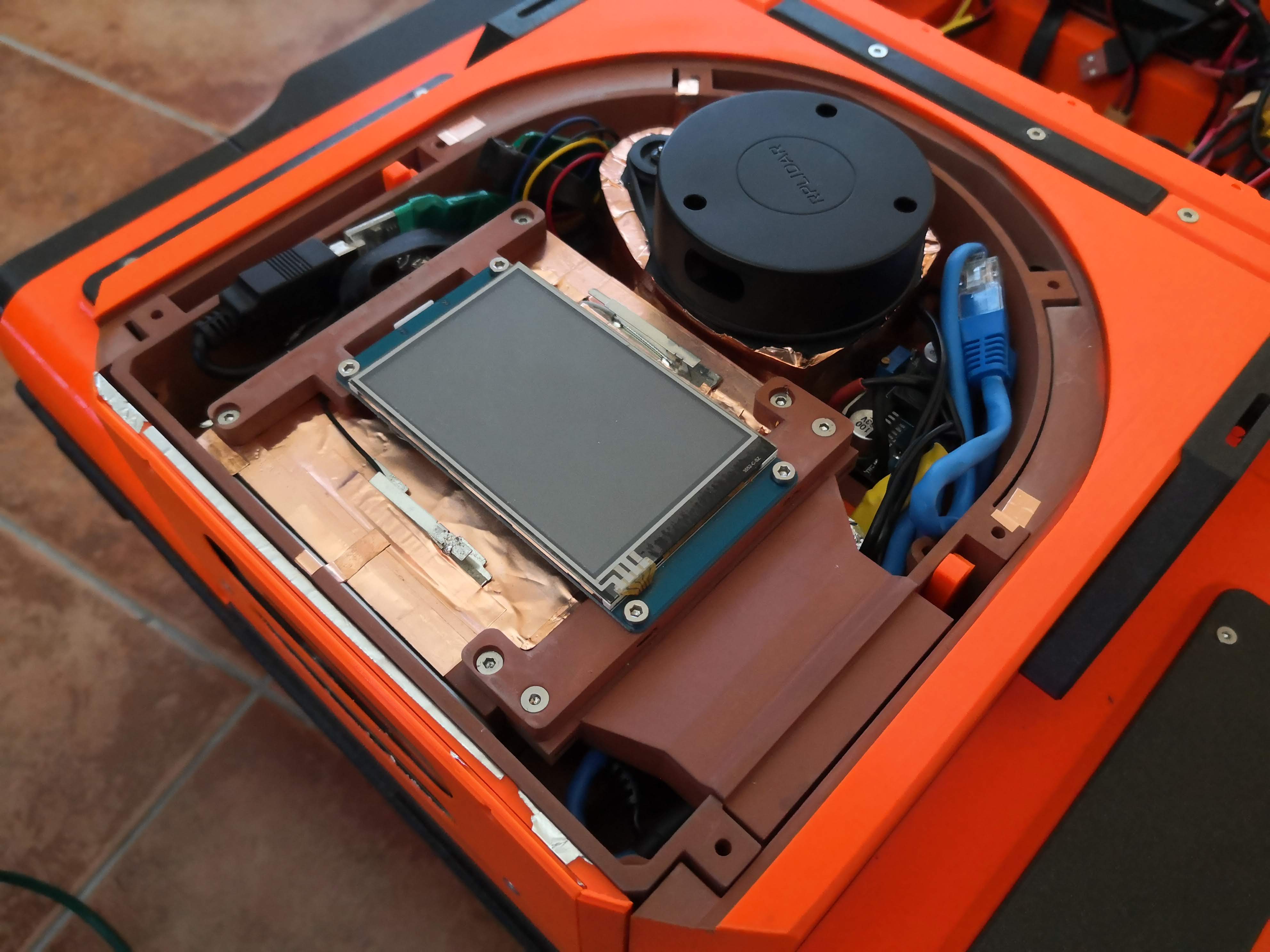
Intel NUC 8, i7, 8GB RAM, 250 GB SSD (NUC 10, NUC 11)
OpenCR - 9250 IMU (optional)
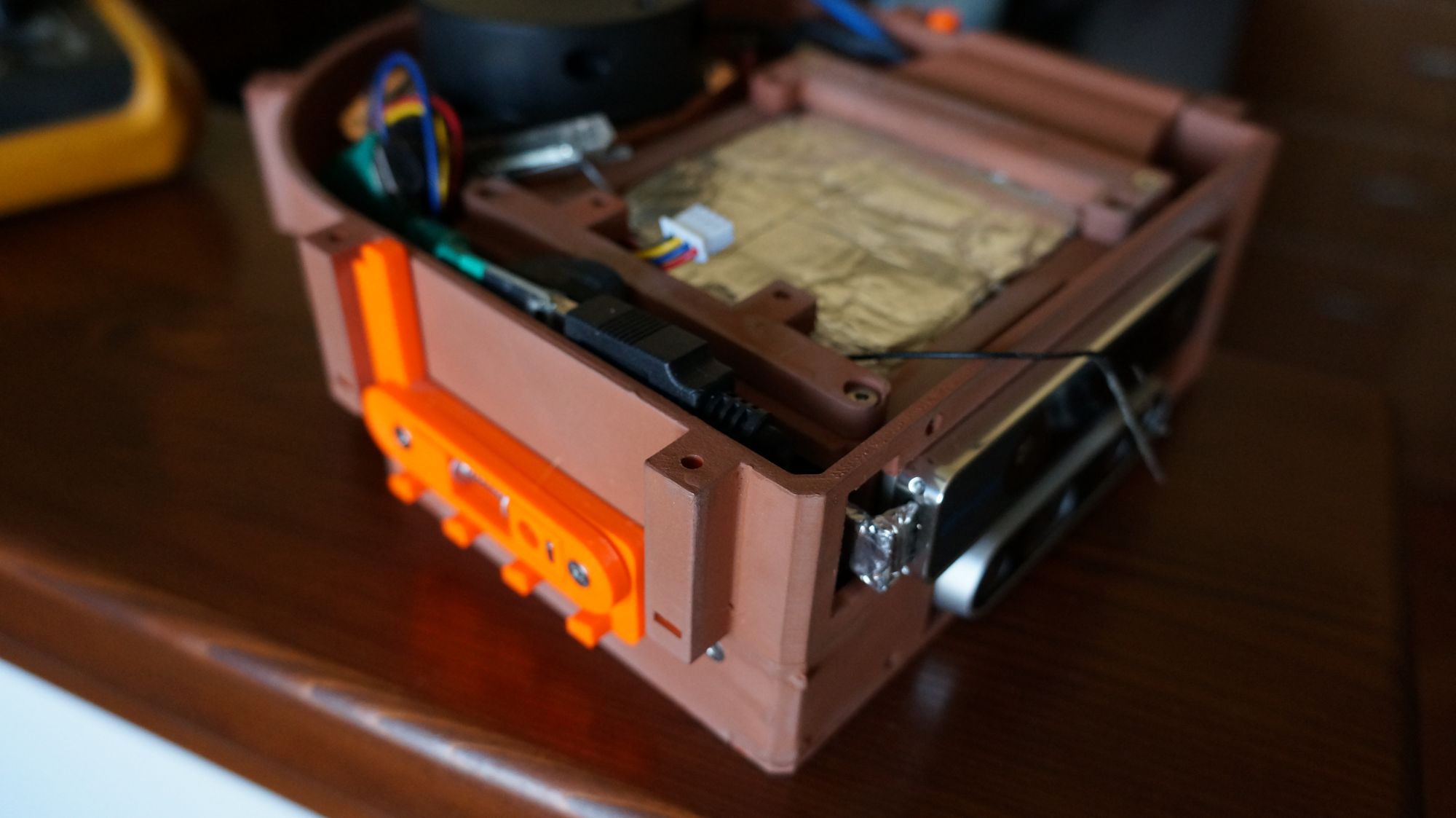
RPLidar A1M8 360° Lidar
Intel realsense D 435 depth cam
Intel realsense T 265 tracking cam (optional)
Nextion 3.5 inch LCD
Blade diameter: 29 cm
Max rpm: 4000
Height adjustments: 10-65 mm
ROS controlled


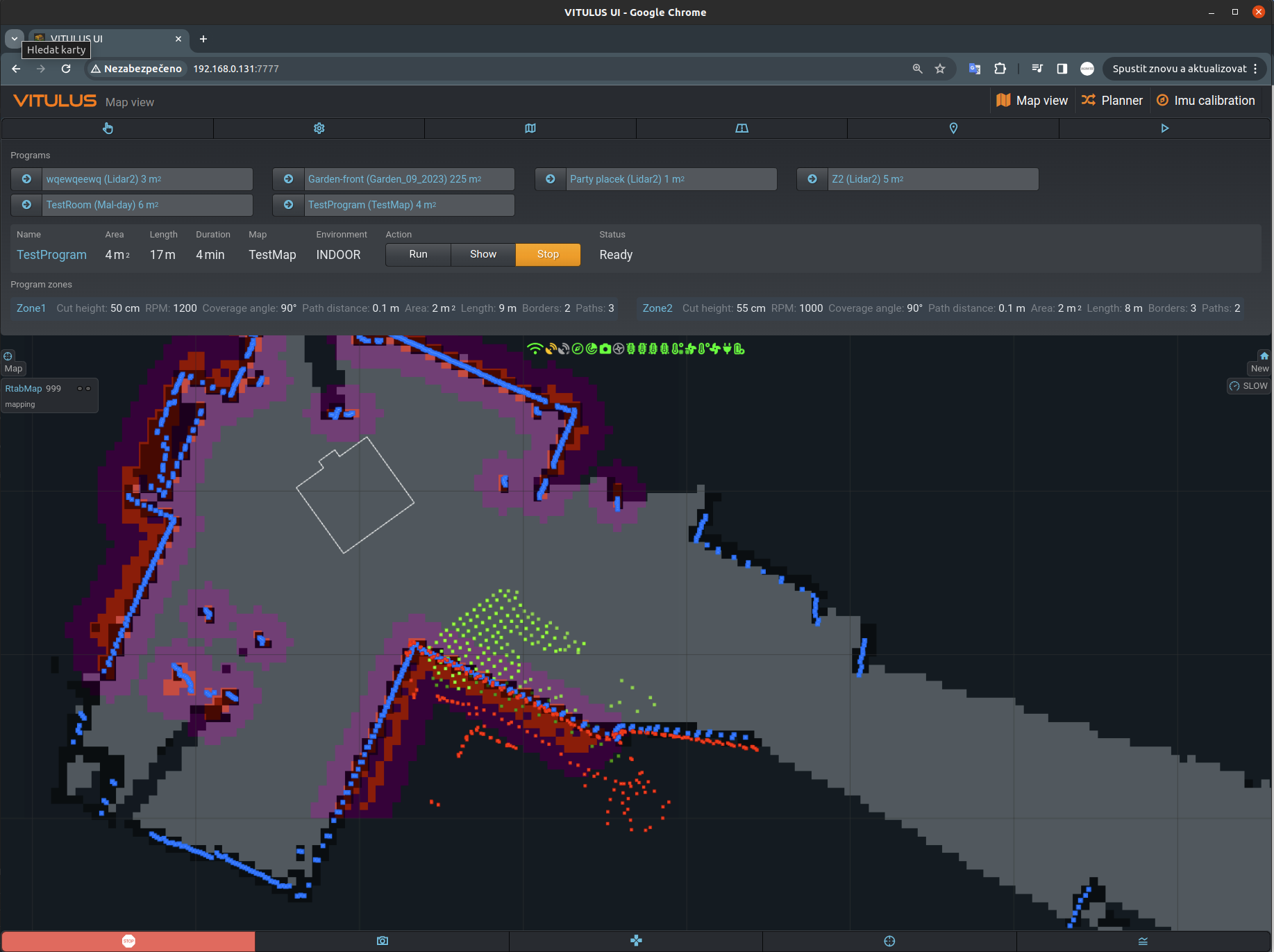
Web interface
Map editing
Zone layout
Mower settings
Program creating
Robot control
Map management
Telemetry visualization
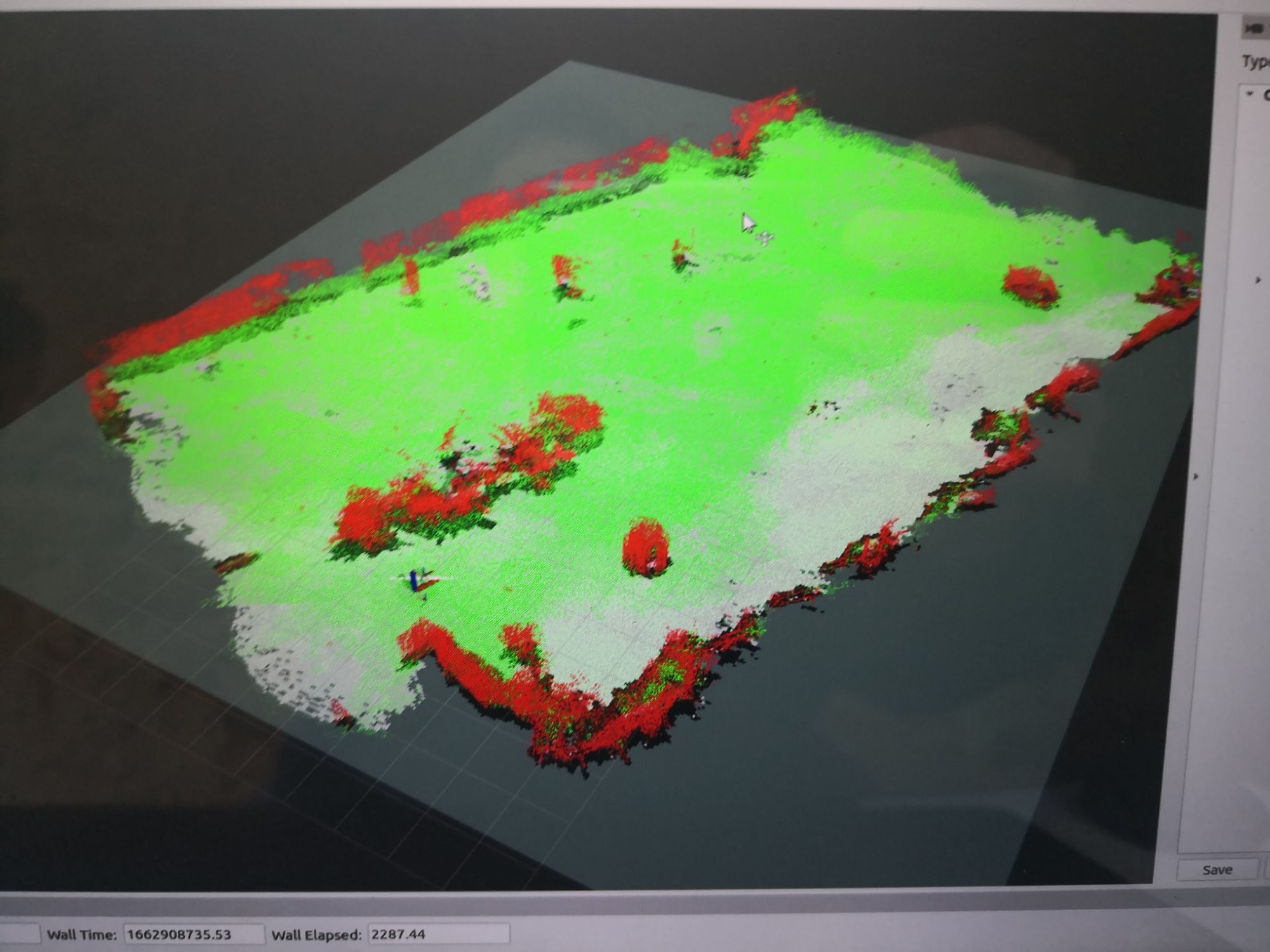
Map visualization
Mower program view and execution


One image is more than thousand words.








I have prepared several guides to help you with the construction. They are not yet completely finished and do not cover the entire construction process, but the essential points are included there. I created them based on the needs of those who have already built Vitulus. If you are missing any information there, I will fill in as needed upon request. Or you can visit my Discord channel and try to find an answer or ask there.
Everything you need to build and operate the robot can be found in my Github repositories. Prepare a lot of patience, time and filament:) I usually recommend starting with wheels and continuing with the battery, but how you do it is up to you.
Here you will find firmware for the mower unit, power module, packages for ROS, materials for PCB production, heatsinks for motors and, last but not least, models for 3D printing. Just everything that can't be bought somewhere.
Here I have prepared models for printing the robot in a slightly clearer form than on Github. There you will find .stl files and .gcode files for Prusa MK3.
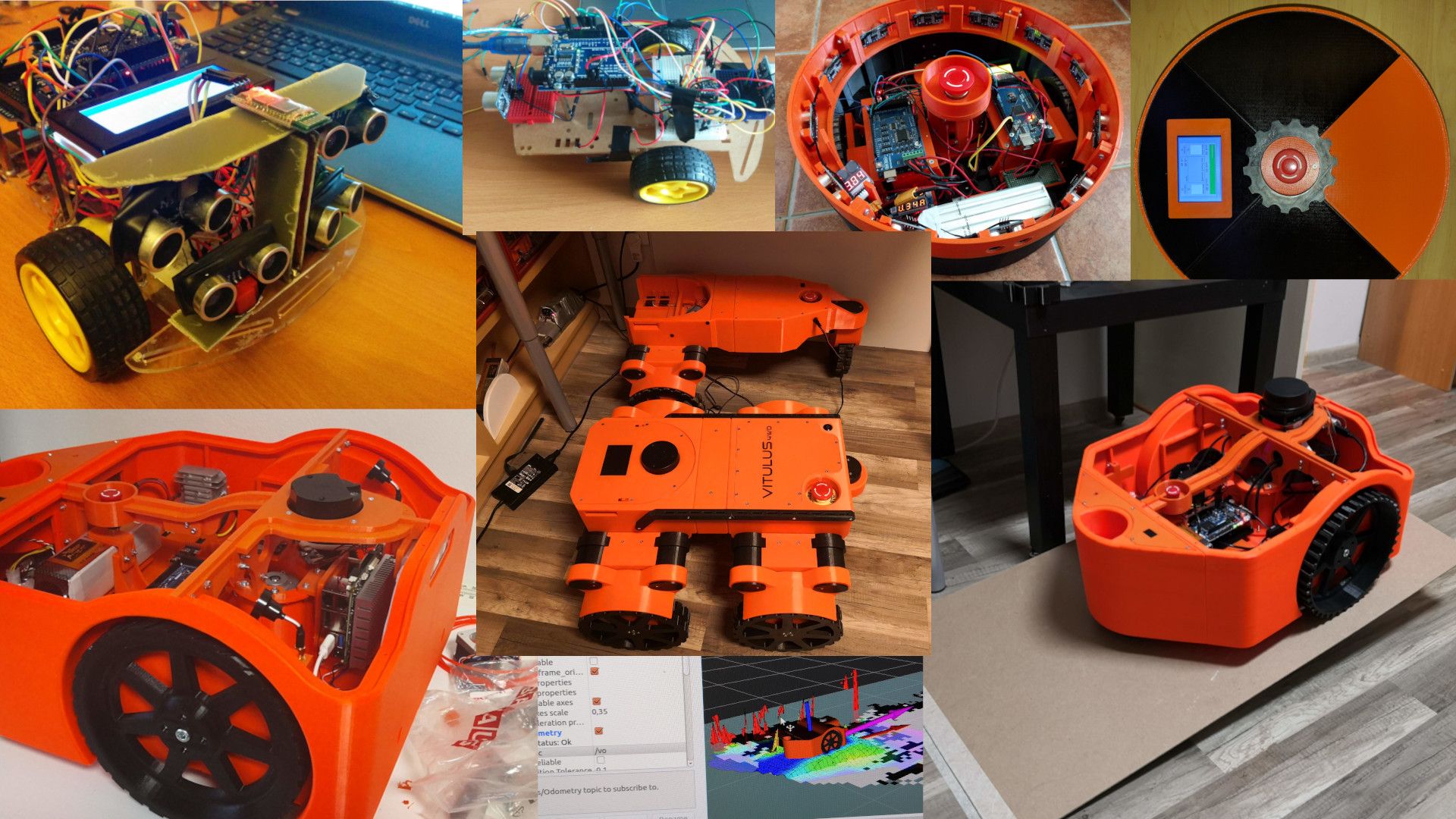
Vitulus is an open-source, 3D-printed autonomous mobile robot platform based on ROS (Robot Operating System). He is primarily set up as a robotic lawn mower, but he is designed as an extensible platform for robotics experimentation and learning.
No. Vitulus is not a commercial product or a ready-made solution. He is a DIY open-source project that you build yourself. He already mows a real garden, but he is intended for makers, learning and experimentation.
Building Vitulus requires the basics of electrical engineering and the basics of ROS. To modify or further develop him you will benefit from experience with 3D modeling and the Python, C++, HTML and JavaScript programming languages.
Building Vitulus is not cheap and takes a lot of time, patience and filament. Think it through before you start, so you do not spend money on something you will not finish.
All firmware, ROS packages, PCB materials and 3D-printable models are published on GitHub (github.com/lacina-dev) and Printables. Step-by-step guides cover the part list, battery, motors, power module, GNSS-RTK, IMU, software install and more.
Vitulus uses MJbots Moteus motor controllers, BLDC 5208 motors, a Li-Ion 18650 6S7P battery, Ardusimple ZED-F9P GNSS RTK, a BNO085 IMU, an Intel NUC running ROS, an RPLidar A1M8 lidar and an Intel RealSense depth camera.

If you have questions, want to get involved in the project, or just want to tell me something. The best way is through my Discord channel, feel free to send me a private message. If you prefer a classic way, try email. Vitulus was born in the Czech Republic, so you can use Czech as well as English.
